Spezielle Neuronale Netze
Computer Vision mit CNNs, Sequenzmodellierung mit RNNs und LSTMs sowie AutoEncoder für Dimensionsreduktion und Anomalieerkennung
Inhaltsverzeichnis
- Computer Vision
- Convolutional Neural Networks (CNN)
- Sequenzmodellierung
- Recurrent Neural Networks (RNN)
- Long Short-Term Memory (LSTM)
- AutoEncoder
- Zusammenfassung
- Abgrenzung zu verwandten Dokumenten
Computer Vision
Computer Vision analysiert Bilder und Videos, um deren Inhalt zu verstehen oder geometrische Informationen zu extrahieren. Typische Aufgaben sind die Objekterkennung, Bildklassifizierung und Segmentierung.
Bilder als Daten
Technisch interpretiert ein Computer-Vision-Modell Bilder als eine Reihe von Pixeln. Ein Pixel (Bildpunkt) bezeichnet den einzelnen Farbwert einer digitalen Rastergrafik.
flowchart LR
subgraph Bild["Digitales Bild"]
A["28 × 28 Pixel"]
end
subgraph Matrix["Pixel-Matrix"]
B["784 Werte<br/>(0-255)"]
end
subgraph Vektor["Input-Vektor"]
C["Flattened<br/>Array"]
end
Bild --> Matrix --> Vektor
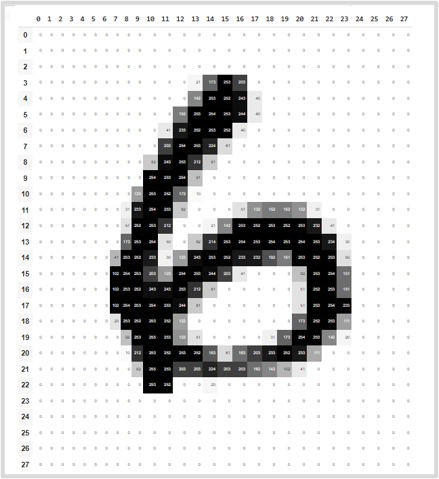
Beispiel: MNIST-Datensatz
Der MNIST-Datensatz enthält handgeschriebene Ziffern als monochromes Bild mit einer Größe von 28 × 28 Pixel. Jedes Pixel hat einen Grauwert zwischen 0 (schwarz) und 255 (weiß).
from tensorflow import keras
import matplotlib.pyplot as plt
# MNIST-Datensatz laden
(X_train, y_train), (X_test, y_test) = keras.datasets.mnist.load_data()
# Bildform prüfen
print(f"Bildgröße: {X_train[0].shape}") # (28, 28)
print(f"Anzahl Trainingsbilder: {X_train.shape[0]}") # 60000
# Beispielbild anzeigen
plt.imshow(X_train[0], cmap='gray')
plt.title(f"Label: {y_train[0]}")
plt.axis('off')
plt.show()
Farbbilder und Kanäle
Während Graustufenbilder nur einen Kanal haben, bestehen Farbbilder aus mehreren Kanälen:
| Bildtyp | Kanäle | Shape (Beispiel) |
|---|---|---|
| Graustufen | 1 | (28, 28, 1) |
| RGB | 3 | (224, 224, 3) |
# Normalisierung der Pixelwerte (0-1 statt 0-255)
X_train = X_train.astype('float32') / 255.0
X_test = X_test.astype('float32') / 255.0
# Reshape für CNN (Kanal hinzufügen)
X_train = X_train.reshape(-1, 28, 28, 1)
X_test = X_test.reshape(-1, 28, 28, 1)
Convolutional Neural Networks (CNN)
Convolutional Neural Networks sind mehrschichtige neuronale Netze, die besonders gut darin sind, Merkmale aus Bilddaten zu extrahieren. Sie funktionieren hervorragend mit Bildern und benötigen wenig Vorverarbeitung.
Grundprinzip
CNNs nutzen zwei Kernkonzepte:
- Faltungen (Convolutions): Erkennen lokale Muster wie Kanten, Texturen oder komplexe Formen
- Pooling: Reduzieren die räumliche Größe und extrahieren dominante Merkmale
flowchart LR
subgraph Input["Input Layer"]
A["Bild<br/>(28×28×1)"]
end
subgraph Feature["Feature Learning"]
B["Convolution"]
C["Pooling"]
D["Convolution"]
E["Pooling"]
end
subgraph Class["Classification"]
F["Flatten"]
G["Dense"]
H["Output"]
end
A --> B --> C --> D --> E --> F --> G --> H
CNN-Architektur im Detail
flowchart TD
subgraph InputLayer["Input Layer"]
I["Bild-Input<br/>Höhe × Breite × Kanäle"]
end
subgraph ConvBlock1["Convolutional Block 1"]
C1["Conv2D<br/>Filter anwenden"]
A1["Aktivierung<br/>(ReLU)"]
P1["MaxPooling<br/>Downsampling"]
end
subgraph ConvBlock2["Convolutional Block 2"]
C2["Conv2D<br/>Tiefere Features"]
A2["Aktivierung<br/>(ReLU)"]
P2["MaxPooling<br/>Weitere Reduktion"]
end
subgraph DenseBlock["Dense Block"]
F["Flatten<br/>2D → 1D"]
D1["Dense Layer<br/>Vollverbunden"]
D2["Output Layer<br/>Softmax"]
end
I --> C1 --> A1 --> P1
P1 --> C2 --> A2 --> P2
P2 --> F --> D1 --> D2
Layer-Typen erklärt
Input Layer
Die Eingabeschicht definiert die Bildmaße: Höhe, Breite und Anzahl der Farbkanäle.
from tensorflow.keras.layers import Input
# Für MNIST (Graustufen)
input_layer = Input(shape=(28, 28, 1))
# Für Farbbilder
input_layer_rgb = Input(shape=(224, 224, 3))
Convolutional Layer
Der Convolutional Layer wendet Filter (Kernel) auf das Bild an, um Merkmale zu erkennen.
flowchart LR
subgraph Input["Input (5×5)"]
IM["1 0 1 0 1<br/>0 1 0 1 0<br/>1 0 1 0 1<br/>0 1 0 1 0<br/>1 0 1 0 1"]
end
subgraph Kernel["Filter (3×3)"]
K["1 0 1<br/>0 1 0<br/>1 0 1"]
end
subgraph Output["Feature Map (3×3)"]
O["Ergebnis der<br/>Faltungsoperation"]
end
Input --> Kernel --> Output
Funktionsweise:
- Der Kernel “gleitet” über das Eingabebild
- An jeder Position: elementweise Multiplikation und Summation
- Das Ergebnis ist eine Feature Map
from tensorflow.keras.layers import Conv2D
# Convolutional Layer mit 32 Filtern (3×3)
conv_layer = Conv2D(
filters=32, # Anzahl der Filter
kernel_size=(3, 3), # Größe des Filters
activation='relu', # Aktivierungsfunktion
padding='same' # Ausgabegröße = Eingabegröße
)
Pooling Layer
Das Pooling reduziert die räumliche Größe der Feature Maps und extrahiert dominante Merkmale.
| Pooling-Typ | Beschreibung | Verwendung |
|---|---|---|
| Max Pooling | Nimmt den maximalen Wert | Standard, wirkt entrauschend |
| Average Pooling | Berechnet den Durchschnitt | Glättung der Features |
| Global Average | Ein Wert pro Feature Map | Vor dem Output Layer |
from tensorflow.keras.layers import MaxPooling2D, AveragePooling2D
# Max Pooling (2×2 Fenster)
max_pool = MaxPooling2D(pool_size=(2, 2))
# Average Pooling
avg_pool = AveragePooling2D(pool_size=(2, 2))
Flatten Layer
Wandelt die mehrdimensionalen Feature Maps in einen eindimensionalen Vektor um.
from tensorflow.keras.layers import Flatten
# Beispiel: (7, 7, 64) → (3136,)
flatten = Flatten()
Dense Layer
Vollständig verbundene Schichten für die finale Klassifizierung.
from tensorflow.keras.layers import Dense
# Hidden Layer
dense1 = Dense(128, activation='relu')
# Output Layer (10 Klassen)
output = Dense(10, activation='softmax')
CNN-Parameter verstehen
| Parameter | Beschreibung | Typische Werte |
|---|---|---|
filters | Anzahl der Kernel/Filter | 32, 64, 128, 256 |
kernel_size | Größe des Filters | (3, 3), (5, 5) |
strides | Schrittweite des Filters | (1, 1), (2, 2) |
padding | Randbehandlung | ‘valid’, ‘same’ |
activation | Aktivierungsfunktion | ‘relu’ |
Best Practice
Beginne mit wenigen Filtern (32) und erhöhe die Anzahl in tieferen Schichten. Die räumliche Auflösung nimmt ab, während die Anzahl der Feature Maps zunimmt.
Sequenzmodellierung
Sequenzmodellierung befasst sich mit Daten, bei denen die Reihenfolge wichtig ist. Dies umfasst zwei Hauptanwendungsbereiche:
- Natural Language Processing (NLP) - Textverarbeitung
- Zeitreihenanalyse - Temporale Daten
Natural Language Processing (NLP)
NLP ist der Bereich, der sich mit der Verarbeitung und dem Verständnis menschlicher Sprache befasst.
flowchart LR
subgraph Tasks["NLP-Aufgaben"]
A["Spracherkennung<br/>(Speech-to-Text)"]
B["Tagging<br/>(Wortarten)"]
C["Named Entity<br/>Recognition"]
D["Sentiment<br/>Analysis"]
E["Textgenerierung<br/>(Text-to-Speech)"]
end
Typische NLP-Aufgaben:
| Aufgabe | Beschreibung | Beispiel |
|---|---|---|
| Spracherkennung | Audio → Text | Diktiersoftware |
| POS-Tagging | Wortarten bestimmen | “Der [DET] Hund [NOUN] läuft [VERB]” |
| NER | Entitäten erkennen | “Berlin [LOC]”, “Siemens [ORG]” |
| Sentiment Analysis | Stimmung erkennen | Positiv, Negativ, Neutral |
| Textgenerierung | Text erzeugen | ChatGPT, Claude |
Text-Preprocessing
Das Preprocessing für NLP unterscheidet sich von der normalen Datenbereinigung:
import re
from tensorflow.keras.preprocessing.text import Tokenizer
from tensorflow.keras.preprocessing.sequence import pad_sequences
def preprocess_text(texts, max_words=10000, max_len=100):
"""
Bereitet Texte für neuronale Netze vor.
Parameters:
-----------
texts : list
Liste von Texten
max_words : int
Maximale Anzahl der Wörter im Vokabular
max_len : int
Maximale Sequenzlänge
Returns:
--------
tuple
(padded_sequences, tokenizer)
"""
# Normalisierung
cleaned_texts = []
for text in texts:
# Kleinschreibung
text = text.lower()
# Sonderzeichen entfernen
text = re.sub(r'[^\w\s]', '', text)
# Mehrfache Leerzeichen entfernen
text = re.sub(r'\s+', ' ', text).strip()
cleaned_texts.append(text)
# Tokenisierung
tokenizer = Tokenizer(num_words=max_words, oov_token='<OOV>')
tokenizer.fit_on_texts(cleaned_texts)
# Text zu Sequenzen
sequences = tokenizer.texts_to_sequences(cleaned_texts)
# Padding (gleiche Länge)
padded = pad_sequences(sequences, maxlen=max_len, padding='post')
return padded, tokenizer
# Beispiel
texts = ["Das ist ein Test.", "Machine Learning ist spannend!"]
sequences, tokenizer = preprocess_text(texts)
print(f"Vokabulargröße: {len(tokenizer.word_index)}")
Zeitreihenanalyse
Zeitreihendaten sind Datenpunkte, die in zeitlicher Reihenfolge indiziert sind.
Wichtige Eigenschaften:
flowchart TD
subgraph Eigenschaften["Zeitreihen-Eigenschaften"]
T["Trend<br/>Langfristige Richtung"]
S["Saisonalität<br/>Wiederkehrende Muster"]
Z["Zyklische Effekte<br/>Unregelmäßige Schwankungen"]
R["Rauschen<br/>Zufällige Variation"]
end
T --> |"beeinflusst"| Prognose
S --> |"beeinflusst"| Prognose
Z --> |"beeinflusst"| Prognose
R --> |"erschwert"| Prognose
| Eigenschaft | Beschreibung | Beispiel |
|---|---|---|
| Trend | Systematischer Anstieg/Abfall | Wirtschaftswachstum |
| Saisonalität | Regelmäßige Muster | Weihnachtsgeschäft |
| Zyklische Effekte | Unregelmäßige Schwankungen | Konjunkturzyklen |
Recurrent Neural Networks (RNN)
Recurrent Neural Networks sind eine Architektur für die Verarbeitung von sequenziellen Daten. Sie haben eingebaute Rückkopplungsschleifen, die es ermöglichen, Informationen aus vorherigen Zeitschritten zu nutzen.
Grundkonzept
flowchart LR
subgraph Standard["Standard NN"]
I1["Input"] --> H1["Hidden"] --> O1["Output"]
end
subgraph RNN["Recurrent NN"]
I2["Input t"] --> H2["Hidden t"]
H2 --> O2["Output t"]
H2 --> |"Gedächtnis"| H2
end
Kernidee: Ein RNN nutzt nicht nur die aktuelle Eingabe, sondern auch das “Gedächtnis” aus vorherigen Schritten.
RNN aufgefaltet
Wenn man ein RNN über die Zeit “auffaltet”, wird die Rückkopplungsschleife sichtbar:
flowchart LR
subgraph t0["t=0"]
X0["x₀"] --> H0["h₀"]
H0 --> Y0["y₀"]
end
subgraph t1["t=1"]
X1["x₁"] --> H1["h₁"]
H1 --> Y1["y₁"]
end
subgraph t2["t=2"]
X2["x₂"] --> H2["h₂"]
H2 --> Y2["y₂"]
end
%% Bestehende Logik
H0 --> |"State"| H1
H1 --> |"State"| H2
%% Erzwingen der Ausrichtung (falls nötig)
%% t0 --- t1 --- t2 (Verbindung zwischen Subgraphen direkt)
%% oder unsichtbar zwischen Nodes:
X0 ~~~ X1 ~~~ X2
Problem: Vanishing Gradients
RNNs haben Schwierigkeiten, langfristige Abhängigkeiten zu lernen. Bei langen Sequenzen werden die Gradienten während des Backpropagation entweder sehr klein (vanishing) oder sehr groß (exploding).
flowchart LR
subgraph Problem["Vanishing Gradient Problem"]
A["Wichtige Info<br/>am Anfang"]
B["..."]
C["..."]
D["..."]
E["Vorhersage<br/>am Ende"]
end
A --> |"Gradient wird<br/>immer kleiner"| B --> C --> D --> E
Lösung: Long Short-Term Memory (LSTM)
Long Short-Term Memory (LSTM)
LSTMs sind eine spezielle RNN-Architektur, die das Problem der verschwindenden Gradienten löst. Sie können Informationen über lange Zeiträume hinweg effektiv speichern und verarbeiten.
LSTM-Zelle Architektur
Eine LSTM-Zelle enthält drei “Gates” (Tore), die den Informationsfluss steuern:
flowchart TD
subgraph LSTM["LSTM-Zelle"]
subgraph Gates["Gates"]
F["Forget Gate<br/>Was vergessen?"]
I["Input Gate<br/>Was speichern?"]
O["Output Gate<br/>Was ausgeben?"]
end
C["Cell State<br/>Langzeitgedächtnis"]
H["Hidden State<br/>Kurzzeitgedächtnis"]
end
Input["Input x_t"] --> F
Input --> I
Input --> O
PrevH["Hidden h_(t-1)"] --> F
PrevH --> I
PrevH --> O
F --> |"steuert"| C
I --> |"aktualisiert"| C
C --> |"beeinflusst"| H
O --> |"steuert"| H
H --> Output["Output y_t"]
Die drei Gates erklärt
| Gate | Funktion | Analogie |
|---|---|---|
| Forget Gate | Entscheidet, welche Informationen aus dem Zellzustand gelöscht werden | “Was kann ich vergessen?” |
| Input Gate | Entscheidet, welche neuen Informationen gespeichert werden | “Was ist wichtig zu merken?” |
| Output Gate | Entscheidet, welche Informationen als Output verwendet werden | “Was ist jetzt relevant?” |
LSTM vs. SimpleRNN
| Aspekt | SimpleRNN | LSTM |
|---|---|---|
| Architektur | Einfache Rückkopplung | Drei Gates + Cell State |
| Langzeitgedächtnis | Schwach | Stark |
| Trainingszeit | Schneller | Langsamer |
| Parameter | Weniger | Mehr |
| Anwendung | Kurze Sequenzen | Lange Sequenzen |
Best Practice
Verwende LSTMs für die meisten Sequenzprobleme. Für sehr lange Sequenzen oder wenn Kontextverständnis in beide Richtungen wichtig ist, nutze bidirektionale LSTMs.
AutoEncoder
Ein AutoEncoder ist ein spezieller Typ von neuronalem Netzwerk, das Daten auf ihre wichtigsten Merkmale komprimiert und dann wieder rekonstruiert.
Architektur
flowchart LR
subgraph Encoder["Encoder"]
I["Input<br/>(784 dim)"]
E1["Dense<br/>(256)"]
E2["Dense<br/>(128)"]
L["Latent Space<br/>(32 dim)"]
end
subgraph Decoder["Decoder"]
D1["Dense<br/>(128)"]
D2["Dense<br/>(256)"]
O["Output<br/>(784 dim)"]
end
I --> E1 --> E2 --> L
L --> D1 --> D2 --> O
I -.-> |"Ziel: Output ≈ Input"| O
Komponenten:
| Komponente | Funktion | Beschreibung |
|---|---|---|
| Encoder | Komprimierung | Reduziert Eingabe auf wesentliche Merkmale |
| Latent Space | Repräsentation | Komprimierte Darstellung der Daten |
| Decoder | Rekonstruktion | Erzeugt Ausgabe aus komprimierter Darstellung |
Anwendungsbereiche
- Dimensionsreduktion: Alternative zu PCA
- Anomalieerkennung: Normale Daten rekonstruieren besser
- Rauschunterdrückung: Denoising AutoEncoder
- Generative Modelle: Variational AutoEncoder (VAE)
Anomalieerkennung mit AutoEncoder
AutoEncoder eignen sich hervorragend zur Anomalieerkennung: Anomalien werden schlechter rekonstruiert als normale Daten.
Denoising AutoEncoder
Ein Denoising AutoEncoder lernt, verrauschte Eingaben zu bereinigen:
Zusammenfassung
flowchart TD
subgraph SNN["Spezielle Neuronale Netze"]
CNN["CNN<br/>Bildverarbeitung"]
RNN["RNN/LSTM<br/>Sequenzen"]
AE["AutoEncoder<br/>Komprimierung"]
end
subgraph Tasks["Aufgaben"]
T1["Bildklassifizierung"]
T2["Objekterkennung"]
T3["NLP"]
T4["Zeitreihen"]
T5["Anomalieerkennung"]
T6["Dimensionsreduktion"]
end
CNN --> T1
CNN --> T2
RNN --> T3
RNN --> T4
AE --> T5
AE --> T6
| Architektur | Stärke | Typische Anwendung |
|---|---|---|
| CNN | Lokale Muster in 2D-Daten | Bilder, Videos |
| RNN | Sequenzielle Abhängigkeiten | Kurze Sequenzen |
| LSTM | Langzeit-Abhängigkeiten | Text, Zeitreihen |
| AutoEncoder | Komprimierung & Rekonstruktion | Anomalien, Rauschen |
Ausblick
Moderne Architekturen wie Transformer (BERT, GPT) haben in vielen NLP-Aufgaben LSTMs abgelöst. Für Computer Vision sind Vision Transformer (ViT) und fortgeschrittene CNNs wie ResNet oder EfficientNet Stand der Technik.
Abgrenzung zu verwandten Dokumenten
| Dokument | Frage |
|---|---|
| Neuronale Netze | Welche Grundlagen gelten für neuronale Modelle allgemein? |
| XAI Erklärbare KI | Wie lassen sich komplexe Netze trotz geringer Transparenz erläutern? |
| Regularisierung | Wie werden neuronale Modelle gegen Overfitting stabilisiert? |
| Modell-Steckbriefe | Wo ordnen sich CNN, LSTM und AutoEncoder im Gesamtüberblick ein? |
Version: 1.0
Stand: Januar 2026
Kurs: Machine Learning. Verstehen. Anwenden. Gestalten.